数据集介绍
RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易梯度任务库,支持机器人强化学习、模仿学习与长时序多阶段任务算法评测。
- 任务时序长度:覆盖简单单步到复杂多阶段长程任务,共计 100 种差异化操纵任务。
- 动作可执行性:提供低级连续控制,基于预设路径点完成运动规划,输出机械臂连续动作轨迹。
- 时序连续性:内置完整专家示范时序序列,全程记录任务从初始状态到完成的交互过程。
- 语言控制:无自然语言指令标注,以标准化固定操纵任务为主。
主要特点
- 任务数量丰富:内置100 种手工设计机器人操纵任务,涵盖触达、开门、厨具操作、多步骤家务等类型。
- 难度梯度完整:从基础简单拾取放置,到烤箱开门、托盘放入等复杂链式多阶段任务。
- 无限示范生成:依托仿真运动规划器,可生成无限量专家演示轨迹,不受真实采集数量限制。
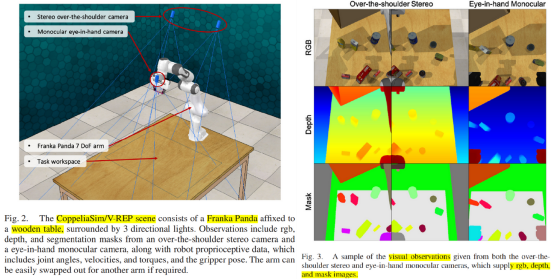
- 多模态观测齐全:配备俯视立体相机、机械臂腕部相机,提供完整 RGB-D 多模态观测数据。
数据来源
- 采集平台:基于 CoppeliaSim 仿真引擎虚拟机械臂平台。
- 场景环境:全仿真室内家居、厨房、办公等标准化虚拟交互场景。
- 数据形式:仿真合成数据,含 RGB-D 图像、关节状态、运动规划轨迹、专家示范序列。
规模
- 任务覆盖:共计100 种不同难度、不同类型的机器人操纵任务。
- 演示样本:支持生成无限量运动规划专家示范轨迹。
- 观测模态:搭载俯视立体相机 + 腕上相机,完备 RGB-D 多模态观测输入。
应用场景
- 机器人强化学习、模仿学习算法仿真训练与基准评测。
- 多步骤长时序链式任务规划、操作推理模型研究。
- 视觉感知 + 机械臂控制端到端模型的快速仿真验证。
- 仿真环境下通用机器人操作预训练数据集构建。
官方网站
数据集:https://sites.google.com/view/rlbench
论文:https://arxiv.org/abs/1909.12271
