数据集介绍
RoboNet 由谷歌机器人团队推出的大规模跨平台机器人视觉交互数据集,以无固定目标的自由交互片段为主,海量视频时序数据用于视觉动力学模型学习、跨机器人技能迁移与虚实域适配。
- 任务时序长度:短程自由交互任务,无明确任务目标,以随机物体交互片段为主。
- 动作可执行性:提供低级控制动作,由自动策略或人类遥操作共同生成。
- 时序连续性:具备连续多帧视频序列,完整记录机器人与环境实时交互过程。
- 语言控制:无自然语言指令标注,无任务级语义定义。
主要特点
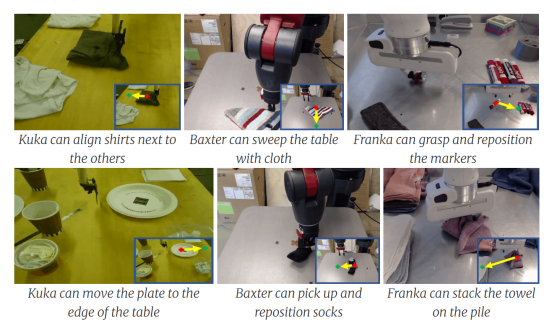
- 跨硬件平台适配:覆盖 7 套不同机械臂硬件与实验场景,适配跨机器人迁移学习。
- 海量视觉时序数据:千万级交互视频帧,适合视觉动力学、自监督表征学习。
- 无约束自由交互:机器人自主随机完成抓取、推动、移动等行为,数据场景丰富无局限。
- 虚实迁移适配:可有效降低仿真环境到真实机器人的域适配成本。
数据来源
- 采集平台:7 套不同结构、参数的机械臂硬件实验平台。
- 场景环境:多类实景工作台、物体交互箱体等通用实验场景。
- 数据形式:实景真实机器人交互视频数据+ 对应底层控制动作、状态时序数据。
规模
- 数据总量:累计 1500 万帧机器人交互视频序列。
- 硬件覆盖:包含 7 种不同机械臂平台与实验场景。
- 交互形式:机器人自主随机完成抓取、移动、推动等无目标物体交互。
应用场景
- 机器人视觉动力学模型、自监督视觉表征学习训练。
- 跨机械臂硬件的技能迁移、通用机器人预训练模型研发。
- 仿真到真实环境的域适应、虚实迁移算法研究。
官方网站
数据集:https://github.com/SudeepDasari/RoboNet/wiki/Getting-Started
论文:https://arxiv.org/abs/1910.11215
