数据集介绍
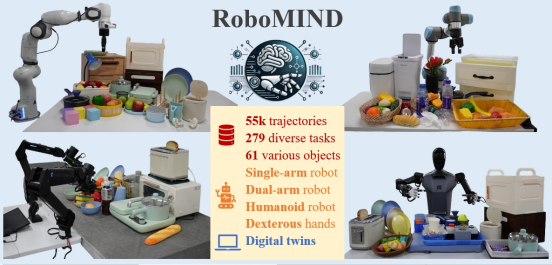
RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集。数据通过人类遥操作采集,在统一的数据收集平台和标准化协议下构建,涵盖四种不同的机器人实例:Franka Emika Panda、UR5e、AgileX 双臂机器人以及双手灵巧型人形机器人。数据集专注于多场景、多物体的中长程任务模仿学习。
- 任务时序长度:中长程任务,单个任务包含几十至数百个动作步骤,适合训练具有多阶段规划能力的模型。
- 动作可执行性:基于真实机器人采集的低层关节控制轨迹,包含完整的关节角度、末端执行器位姿以及多视角视觉、本体感知等多模态信息,可直接用于真机部署。
- 时序连续性:数据为连续轨迹序列,保留了任务执行的完整时序依赖关系。此外,数据集还包含5,000 个真实世界的失效演示,每个失效演示均附有详细原因标注,支持策略学习中的失效反思与纠错能力训练。
- 语言控制:提供自然语言任务描述,支持语言条件的行为生成与任务泛化。
主要特点
- 高复杂度任务覆盖:包含479 个跨场景任务,覆盖 96 类不同物体,任务设计强调场景与物体的泛化性。
- 真实环境采集:数据 100% 在真实物理环境中采集,具备直接的真机迁移价值。
- 多模态数据:同步记录多视角 RGB 图像、深度图、关节状态、末端执行器位姿等多模态信息。
- 标准化数据格式:遵循 LeRobot 等主流开源框架的数据规范,便于直接加载与使用。
数据来源
- 发布方:北京仿人机器人创新中心
- 采集平台:多款真实人形机器人平台
- 采集方式:遥操作与自主采集结合
规模
- 演示轨迹:107,000 条真实机器人操作轨迹
- 数据体量:超过 1 TB
- 任务数量:479 个跨场景任务
- 物体数量:96 类不同物体
- 轨迹构成:5 万条轨迹为精细标注数据
应用场景
覆盖多种真实物理操作场景,特别适合需要跨场景泛化的任务:
- 家庭服务(整理、取放、清洁等)
- 商业服务(零售补货、餐饮服务等)
- 工业操作(物料分拣、装配等)
- 物流仓储(包裹分拣、货架整理等)
官方网站
数据集链接:https://x-humanoid-robomind.github.io
论文链接:https://arxiv.org/abs/2412.13877
