数据集介绍
DexonomySim 是在国家数据局数字科技和基础设施建设司指导下,由银河通用发起的开源高质量仿真数据集,专为具身智能机器人灵巧抓取任务设计。
- 任务时序长度:单步抓取任务,包含超过950 万条独立抓取姿态数据。
- 动作可执行性:基于物理仿真生成,适用于多指灵巧手在高自由度操作场景下的模型训练与算法验证。数据格式规范统一、真实可溯、模型适配性高。
- 时序连续性:非连续数据,聚焦于独立抓取姿态的优化与评估。
- 语言控制:不支持自然语言控制,专注于抓取姿态本身的几何与力学特性。
主要特点
- 全球最大规模灵巧手抓取数据集:包含超过 950 万条高质量抓取姿态,是当前具身智能领域开源的最大规模灵巧手操作合成数据集。
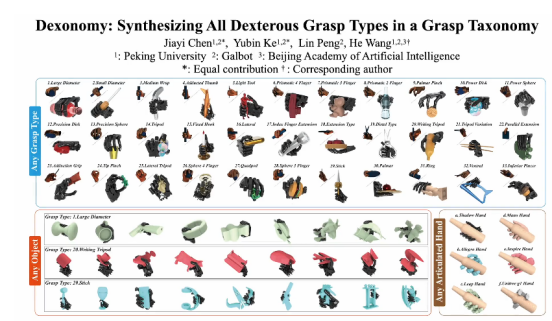
- 广泛抓握类型覆盖:覆盖超 1 万个物体与 31 种常用抓握类型,涵盖人类抓握分类法中约 94% 的类型。
- 物理仿真生成:基于高效优化的物理仿真技术生成,数据质量高、格式规范统一,有效满足模型泛化需求。
- 强泛化能力支撑:高多样性与大规模特性显著提升模型泛化能力,助力人形机器人实现对不规则或精细物体的稳定抓取。
数据来源
- 指导单位:国家数据局数字科技和基础设施建设司
- 发布方:银河通用
- 生成方式:基于物理仿真,通过高效优化算法生成抓取姿态
规模
- 抓取姿态:超过 950 万条高质量抓取姿态
- 物体覆盖:超过 1 万个不同物体
- 抓握类型:31 种常用抓握类型(覆盖人类抓握分类法约 94%)
- 数据性质:合成数据(仿真生成)
应用场景
适用于多指灵巧手在高自由度操作场景下的模型训练与算法验证,包括:
- 商超零售场景的物体抓取
- 工业分拣场景的精细操作
- 家庭服务场景的物体操控
- 医疗康养场景的辅助操作
