数据集介绍
Fourier ActionNet 是 Fourier 与上海交通大学 联合发布的先驱性灵巧双手操作数据集,专注于人形机器人平台上灵巧手的双臂协同操作。与现有以夹爪为主的大规模机器人数据集不同,ActionNet 针对人形机器人的本体形态进行设计,旨在推动通用具身智能在真正类人形态上的研究突破。数据集包含超过 30,000 条遥操作轨迹,或约 140 小时的交互数据,是目前最大的以灵巧手为人形机器人操作核心的数据集之一。
- 任务时序长度:中长程任务,覆盖完整的手臂+手部协同操作序列
- 动作可执行性:基于高质量遥操作系统采集的低层控制轨迹,包含双臂与灵巧手的完整关节状态,可直接用于真机部署
- 时序连续性:数据为连续轨迹序列,保留双臂协同操作的完整时序依赖
- 语言控制:不支持自然语言控制,聚焦于动作轨迹本身
主要特点
- 灵巧手+双臂人形数据稀缺填补:当前大规模数据集多聚焦于夹爪式操作,ActionNet 是首个专注于灵巧手在人形机器人上实现双臂操作的大规模数据集。
- 高质量遥操作采集:采用遥操作系统采集真实人类演示,确保数据质量与可执行性。
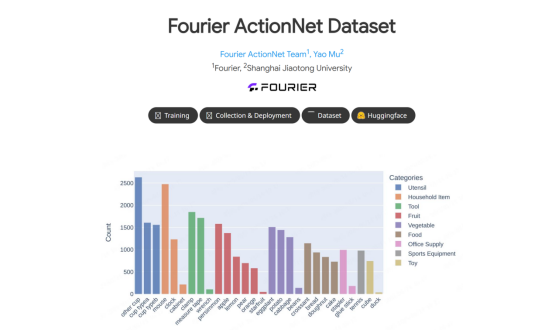
- 多样化场景与物体:聚焦桌面场景中多样化物体的双臂操作,包含随机化物体布局。
- 完整工具链开源:除数据集外,配套的训练流程与评估工具已基于 Apache 2.0 协议开源。
- 灵活使用许可:数据集基于 CC BY-NC-SA 4.0 协议共享,允许非商业研究与教育用途。
数据来源
- 发布方:Fourier(傅利叶智能)与上海交通大学
- 采集平台:人形机器人(配备灵巧手)+ 遥操作系统
- 采集方式:真实环境遥操作采集
- 场景设置:随机化桌面场景,多样化物体
规模
- 轨迹总数:30,000+ 条遥操作轨迹
- 总交互时长:约 140 小时
- 操作类型:双臂协同 + 灵巧手操作
- 场景类型:随机化桌面场景
- 数据格式:包含双臂与灵巧手的完整关节状态轨迹
应用场景
- 灵巧双手操作:抓取、放置、旋转、拧动等需要精细手指控制的动作
- 双臂协同任务:需要双臂配合完成的任务(如搬运大物体、装配等)
- 人形机器人策略学习:为面向人形机器人的策略训练提供数据基础
- 仿真到真实迁移:可作为真机预训练与微调的数据来源
官方网址
