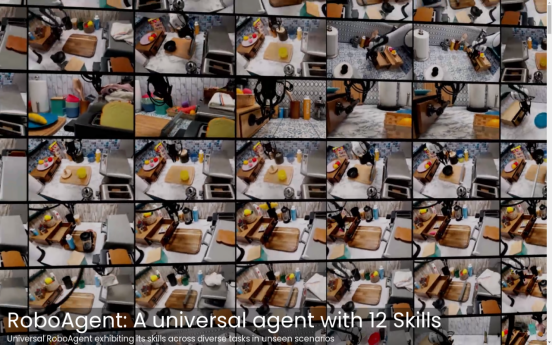
数据集介绍 RoboSet 是一个大规模开源机器人操作数据集,由卡内基梅隆大学和 Meta AI 研究团队创建。该数据集包含 7500 条通过...

数据集介绍 BridgeData V2 (2023) 是由加州大学伯克利分校研究团队发布的大规模、多样化机器人操作数据集。该数据集在前代Brid...
RT-1 (Robotics Transformer 1) (2022)
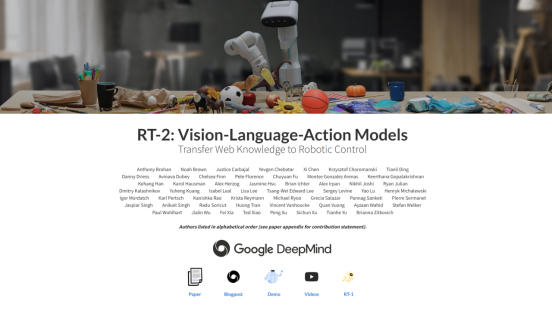
数据集介绍 RT-1 (Robotics Transformer 1) (2022) 是由Google DeepMind和Everyday Robots团队联合提出的多任务机器人操作模型...
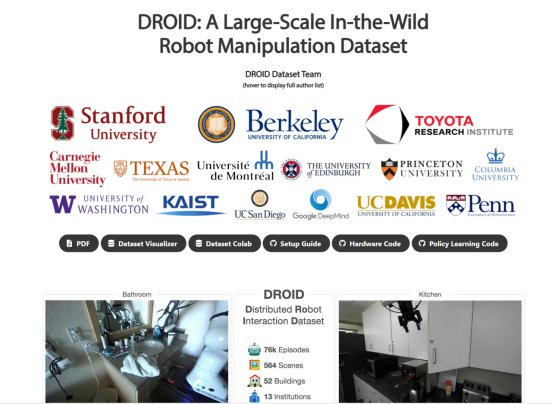
数据集介绍 DROID (2024) 数据集由斯坦福大学联合全球13家顶尖研究机构共同打造,是一个大规模、高多样性的真实世界机器人操作...
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...