数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...

数据集介绍 InternScenes 是上海人工智能实验室发布的大规模、可模拟室内场景数据集,论文收录于 NeurIPS 2025。具身人工智能的...
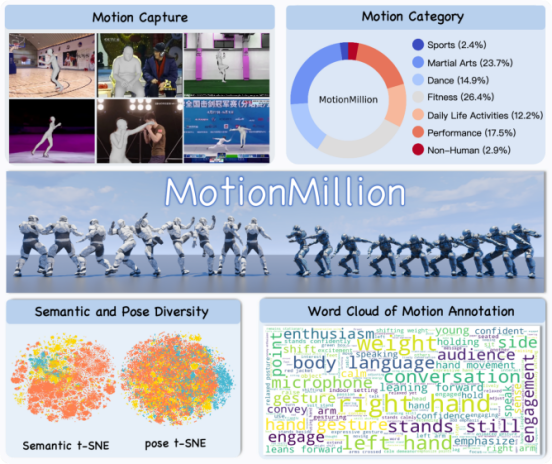
数据集介绍 MotionMillion 是浙江大学发布的大规模人体动作数据集,专注于从视频中提取的连续人体运动与操作状态。 任务时序长...
数据集介绍 RoboCOIN 是北京人工智能研究院(BAAI) 发布的大规模、跨本体双手操作数据集,旨在弥合双手机器人领域因硬件异质性...
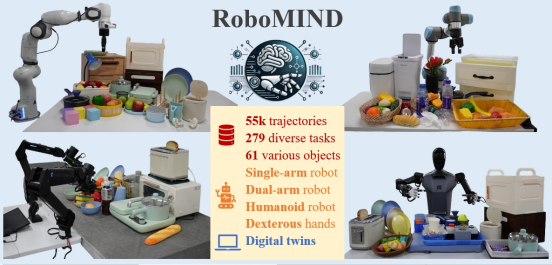
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...

数据集介绍 (注:基地下载的数据集版本在官网已经被删除,但是官网更新了一个新版本的数据集) 白虎-VTouch(White Tiger-VTo...
数据集介绍 LET (Large-scale Embodiment Teleoperation dataset) 是由乐聚智能构建、已捐赠至开放原子开源基金会OpenLoong社区...
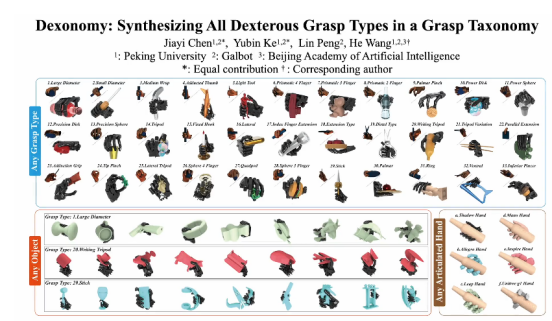
数据集介绍 DexonomySim 是在国家数据局数字科技和基础设施建设司指导下,由银河通用发起的开源高质量仿真数据集,专为具身智能...
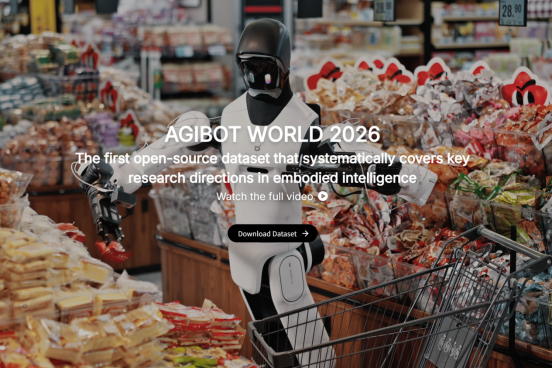
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...
数据集介绍 RoboNet 由谷歌机器人团队推出的大规模跨平台机器人视觉交互数据集,以无固定目标的自由交互片段为主,海量视频时序...
