数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
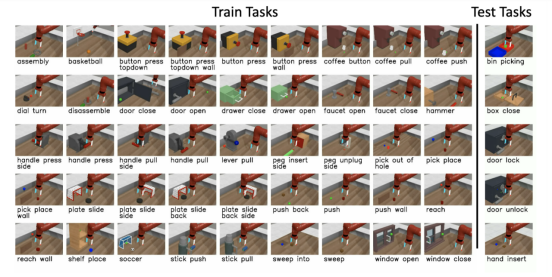
数据集介绍 Meta-World (2019) 是由斯坦福大学发布的面向多任务和元强化学习研究的仿真机械臂操作基准环境。该数据集/环境包含5...
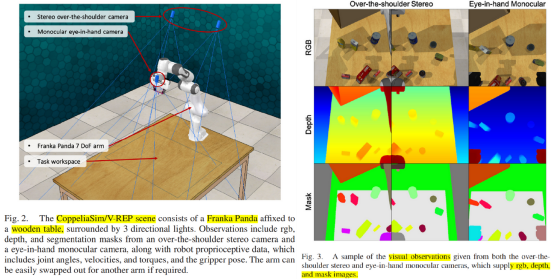
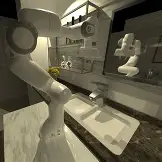
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...
数据集介绍 MIME (Manipulation Instruction, Monitoring, and Evaluation) (2018) 是由卡内基梅隆大学发布的早期大规模多任务...

数据集介绍 BC-Z (Behavior Cloning from Zero-shot) (2022) 是由Google Everyday Robots团队发布的大规模、多机器人、多场景机...
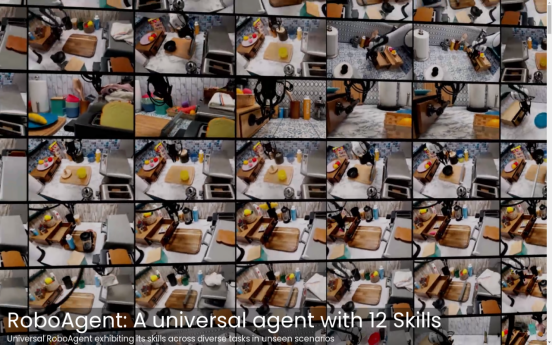
数据集介绍 RoboSet 是一个大规模开源机器人操作数据集,由卡内基梅隆大学和 Meta AI 研究团队创建。该数据集包含 7500 条通过...

数据集介绍 BridgeData V2 (2023) 是由加州大学伯克利分校研究团队发布的大规模、多样化机器人操作数据集。该数据集在前代Brid...
RT-1 (Robotics Transformer 1) (2022)
数据集介绍 RT-1 (Robotics Transformer 1) (2022) 是由Google DeepMind和Everyday Robots团队联合提出的多任务机器人操作模型...
数据集介绍 DROID (2024) 数据集由斯坦福大学联合全球13家顶尖研究机构共同打造,是一个大规模、高多样性的真实世界机器人操作...
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
