数据集介绍 Unitree G1 操作数据集是宇树科技为推进全球具身智能行业发展而开源的真机操作数据集,旨在让人形机器人不仅“能跑...
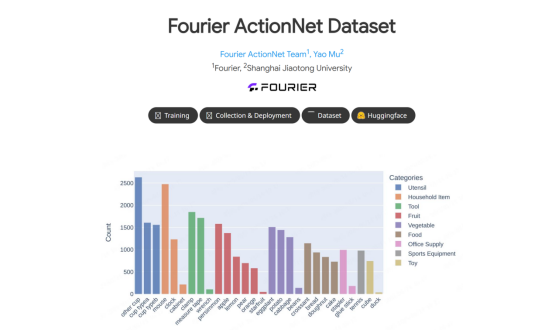
数据集介绍 Fourier ActionNet 是 Fourier 与上海交通大学 联合发布的先驱性灵巧双手操作数据集,专注于人形机器人平台上灵巧手...

OmniWorld 是上海人工智能实验室发布的大规模、多领域、多模态数据集,专为 🌍 4D 世界建模(如 4D 几何重建、未来预测与相机...
数据集介绍 InternData-M1 是一个全面的实体机器人数据集,包含 244K 模拟演示,具有丰富的基于帧的信息,包括 2D/3D 框、轨迹...
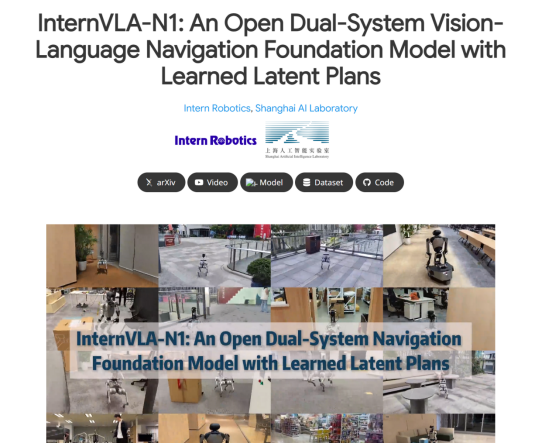
数据集介绍 InternData-N1 是上海人工智能实验室发布的目前场景最多元的大规模导航数据集,旨在支撑首个端到端双系统导航大模...
数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...

数据集介绍 InternScenes 是上海人工智能实验室发布的大规模、可模拟室内场景数据集,论文收录于 NeurIPS 2025。具身人工智能的...
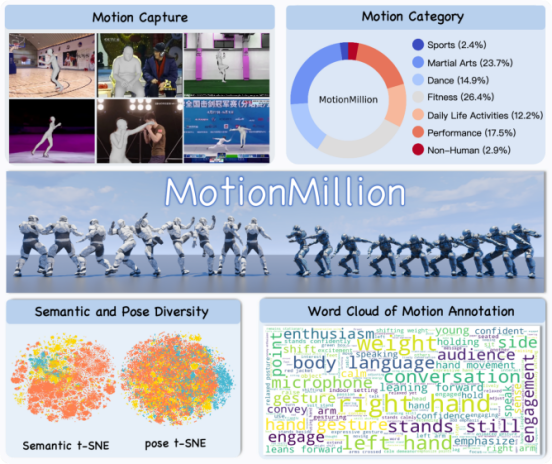
数据集介绍 MotionMillion 是浙江大学发布的大规模人体动作数据集,专注于从视频中提取的连续人体运动与操作状态。 任务时序长...
数据集介绍 RoboCOIN 是北京人工智能研究院(BAAI) 发布的大规模、跨本体双手操作数据集,旨在弥合双手机器人领域因硬件异质性...
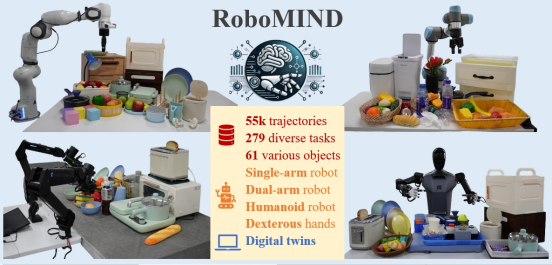
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
