Unitree B2-W
Unitree B1-W
Unitree B2
Unitree B1
Unitree A2/A2-Pro
Unitree A2-W
无本体人体操作视频数据集
简介 本数据集为头部视角采集人体第一视角示范视频数据集,由真人在真实场景完成整理类任务录制而成。 场景与任务覆盖(持续更...
星海图R1Lite机器人操作数据集
简介 本数据集为机械臂精细操作时序数据集,包含开关瓶盖、整理薯片、整理衣物、整理饮料四类典型桌面操作任务。 任务覆盖(持...
宇树G1机器人操作数据集
本数据集为人形机器人操作采集的具身智能视觉数据集,聚焦生活场景下的「捡取、抓取、搬运」等连续操作任务。 任务覆盖 病房取...
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
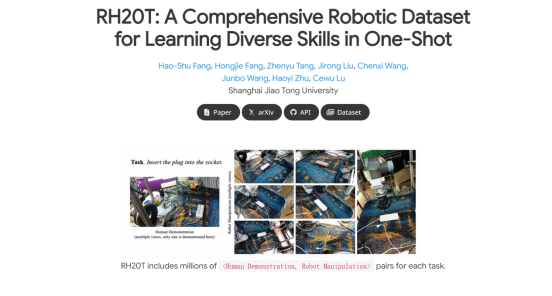
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...