固定基座机械臂(单臂/双臂)
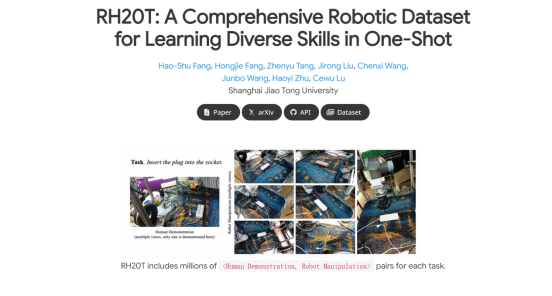
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...
RoboTurk (Real-World) (2019)
数据集介绍 RoboTurk 真实世界数据集由斯坦福大学发布,依托众包远程遥操作构建中等时长家用机器人操作数据集,以低成本众包模...
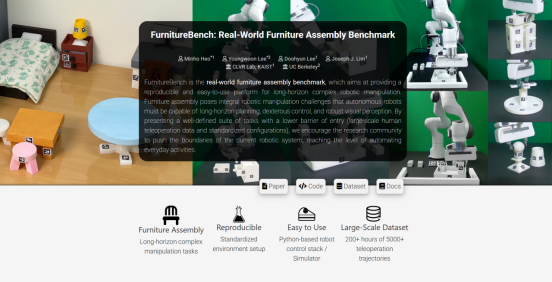
FurnitureBench (2023)
数据集介绍 FurnitureBench 是韩国科学技术院 CLVR 实验室推出的长时序家具装配机器人操作基准数据集,聚焦多阶段、高精度家具...
Mobile ALOHA (2024)
数据集介绍 Mobile ALOHA 是一个专注于双臂移动操作的真实世界数据集,解决了传统数据集局限于桌面静态操作的问题。该数据通过...
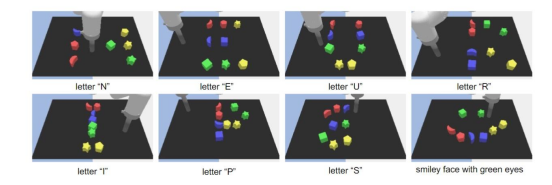
VIMA (2023)
数据集介绍 VIMA 是一个大规模、多模态的机器人操作基准数据集,旨在通过多模态提示(文本、图像、视频的交错序列)来训练通用...
Language-Table (2022)
数据集介绍 Language-Table (2022) 是由Google DeepMind发布的大规模、语言驱动的机器人操作数据集。该数据集专门设计用于学习...
ManiSkill (2021–2023)
数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
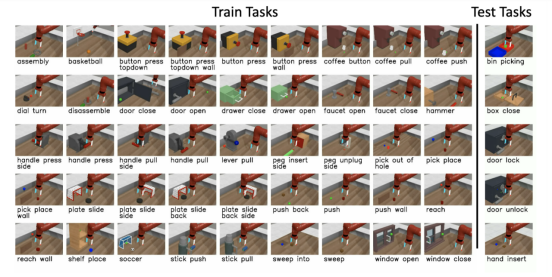
Meta-World (2019)
数据集介绍 Meta-World (2019) 是由斯坦福大学发布的面向多任务和元强化学习研究的仿真机械臂操作基准环境。该数据集/环境包含5...
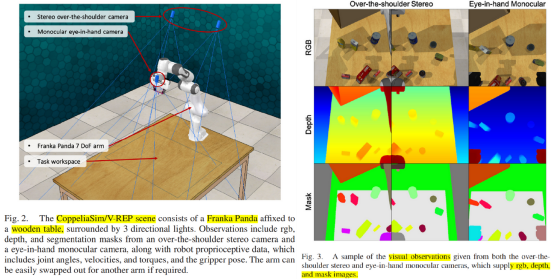
RLBench (2020)
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...
MIME (2018)
数据集介绍 MIME (Manipulation Instruction, Monitoring, and Evaluation) (2018) 是由卡内基梅隆大学发布的早期大规模多任务...