数据来源于仿真环境(Isaac Sim、MuJoCo、Habitat等)
InternScenes
数据集介绍 InternScenes 是上海人工智能实验室发布的大规模、可模拟室内场景数据集,论文收录于 NeurIPS 2025。具身人工智能的...
InternData-M1
数据集介绍 InternData-M1 是一个全面的实体机器人数据集,包含 244K 模拟演示,具有丰富的基于帧的信息,包括 2D/3D 框、轨迹...
InternData-N1
数据集介绍 InternData-N1 是上海人工智能实验室发布的目前场景最多元的大规模导航数据集,旨在支撑首个端到端双系统导航大模...
InternData-A1
数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...
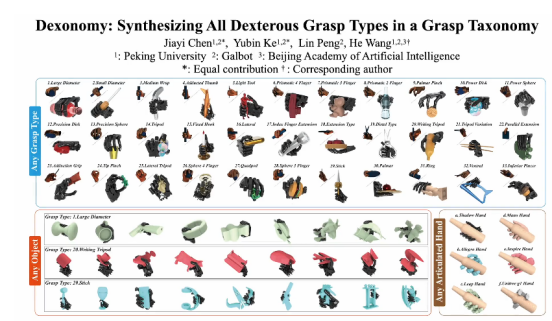
DexonomySim
数据集介绍 DexonomySim 是在国家数据局数字科技和基础设施建设司指导下,由银河通用发起的开源高质量仿真数据集,专为具身智能...
VIMA (2023)
数据集介绍 VIMA 是一个大规模、多模态的机器人操作基准数据集,旨在通过多模态提示(文本、图像、视频的交错序列)来训练通用...
ManiSkill (2021–2023)
数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
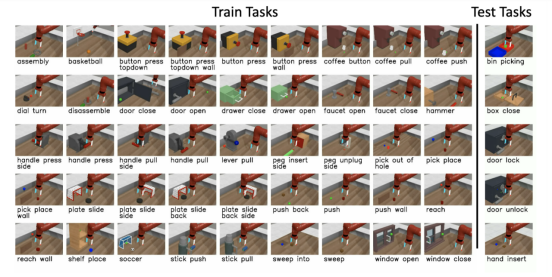
Meta-World (2019)
数据集介绍 Meta-World (2019) 是由斯坦福大学发布的面向多任务和元强化学习研究的仿真机械臂操作基准环境。该数据集/环境包含5...
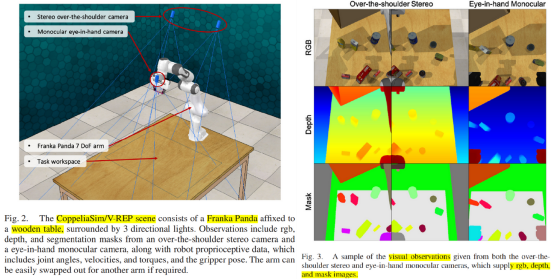
RLBench (2020)
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...