聚焦双臂/双手协同的操作任务
Open X-Embodiment
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
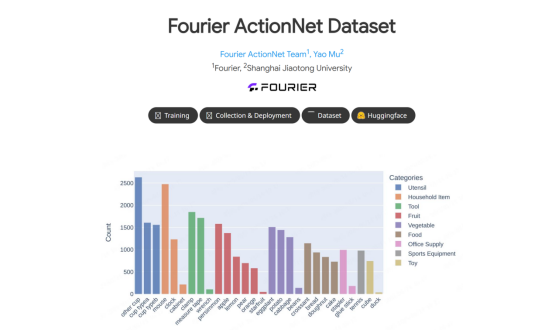
Fourier ActionNet
数据集介绍 Fourier ActionNet 是 Fourier 与上海交通大学 联合发布的先驱性灵巧双手操作数据集,专注于人形机器人平台上灵巧手...
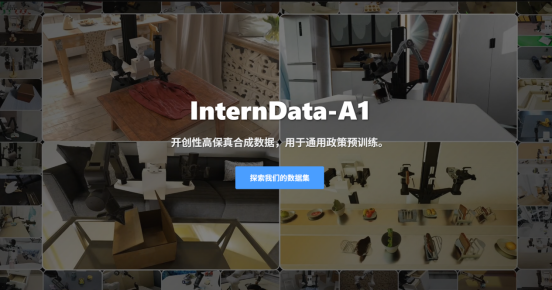
InternData-A1
数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...
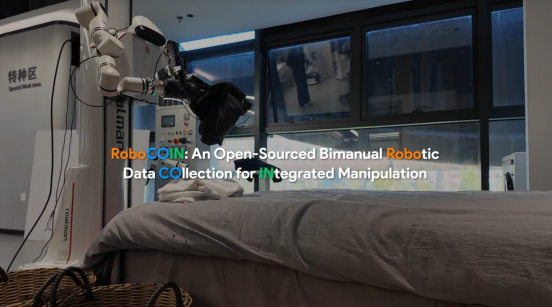
RoboCOIN
数据集介绍 RoboCOIN 是北京人工智能研究院(BAAI) 发布的大规模、跨本体双手操作数据集,旨在弥合双手机器人领域因硬件异质性...
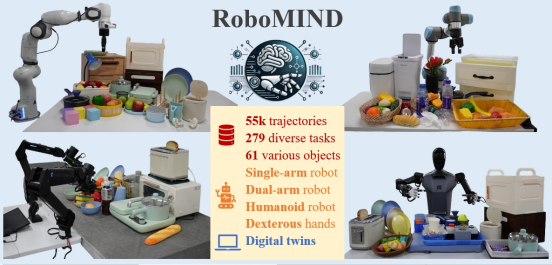
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
白虎(White Tiger)
数据集介绍 (注:基地下载的数据集版本在官网已经被删除,但是官网更新了一个新版本的数据集) 白虎-VTouch(White Tiger-VTo...
LET
数据集介绍 LET (Large-scale Embodiment Teleoperation dataset) 是由乐聚智能构建、已捐赠至开放原子开源基金会OpenLoong社区...
Mobile ALOHA (2024)
数据集介绍 Mobile ALOHA 是一个专注于双臂移动操作的真实世界数据集,解决了传统数据集局限于桌面静态操作的问题。该数据通过...
MIME (2018)
数据集介绍 MIME (Manipulation Instruction, Monitoring, and Evaluation) (2018) 是由卡内基梅隆大学发布的早期大规模多任务...