长序列任务(>60秒,或多步规划)
Open X-Embodiment
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
InternData-A1
数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...
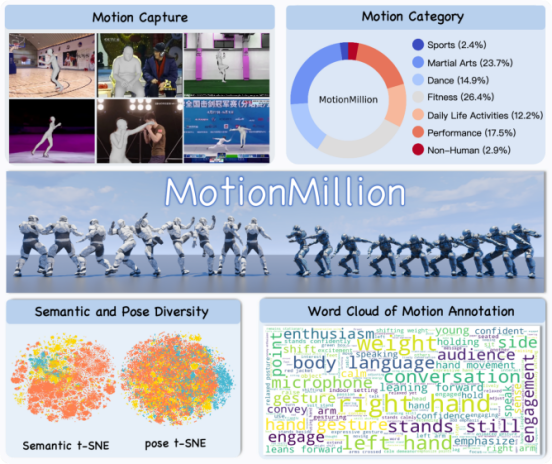
MotionMillion
数据集介绍 MotionMillion 是浙江大学发布的大规模人体动作数据集,专注于从视频中提取的连续人体运动与操作状态。 任务时序长...
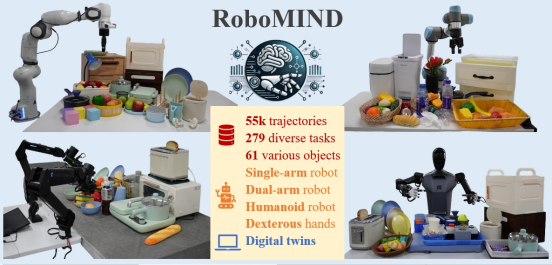
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
LET
数据集介绍 LET (Large-scale Embodiment Teleoperation dataset) 是由乐聚智能构建、已捐赠至开放原子开源基金会OpenLoong社区...
AgiBot World
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...
FurnitureBench (2023)
数据集介绍 FurnitureBench 是韩国科学技术院 CLVR 实验室推出的长时序家具装配机器人操作基准数据集,聚焦多阶段、高精度家具...
Mobile ALOHA (2024)
数据集介绍 Mobile ALOHA 是一个专注于双臂移动操作的真实世界数据集,解决了传统数据集局限于桌面静态操作的问题。该数据通过...
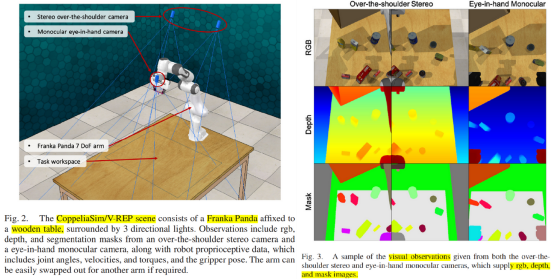
RLBench (2020)
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...