同时包含3种及以上模态
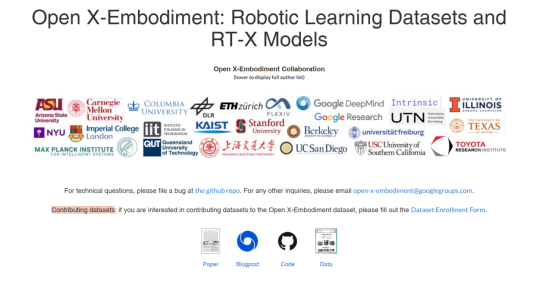
Open X-Embodiment
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
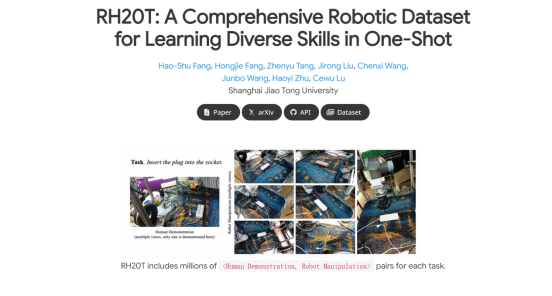
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...
OmniWorld
OmniWorld 是上海人工智能实验室发布的大规模、多领域、多模态数据集,专为 🌍 4D 世界建模(如 4D 几何重建、未来预测与相机...
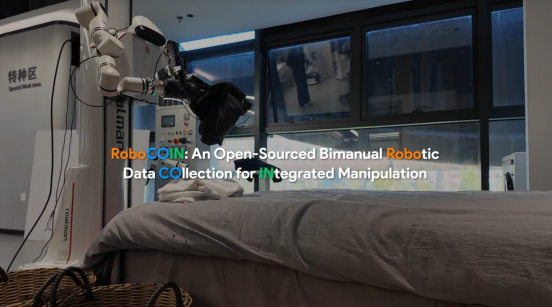
RoboCOIN
数据集介绍 RoboCOIN 是北京人工智能研究院(BAAI) 发布的大规模、跨本体双手操作数据集,旨在弥合双手机器人领域因硬件异质性...
白虎(White Tiger)
数据集介绍 (注:基地下载的数据集版本在官网已经被删除,但是官网更新了一个新版本的数据集) 白虎-VTouch(White Tiger-VTo...
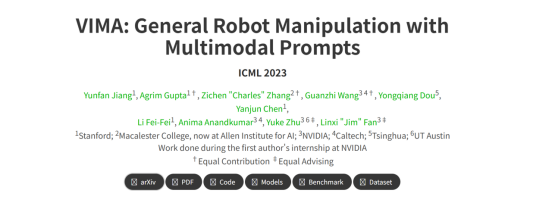
VIMA (2023)
数据集介绍 VIMA 是一个大规模、多模态的机器人操作基准数据集,旨在通过多模态提示(文本、图像、视频的交错序列)来训练通用...