聚焦单臂/单机械臂的操作任务
Open X-Embodiment
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
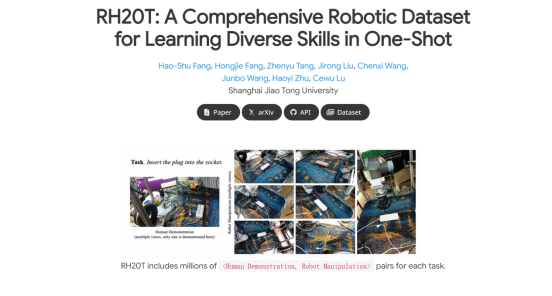
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...
InternData-M1
数据集介绍 InternData-M1 是一个全面的实体机器人数据集,包含 244K 模拟演示,具有丰富的基于帧的信息,包括 2D/3D 框、轨迹...
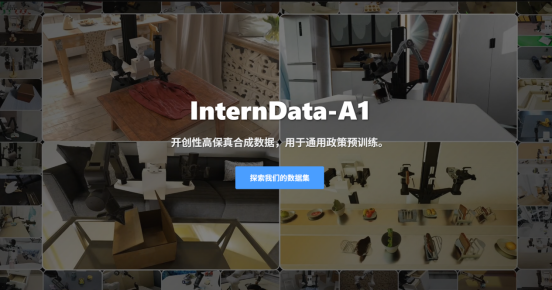
InternData-A1
数据集介绍 InternData-A1 是上海人工智能实验室发布的大规模高保真合成操作数据集,论文收录于 arXiv 2025。该数据集首次证明...
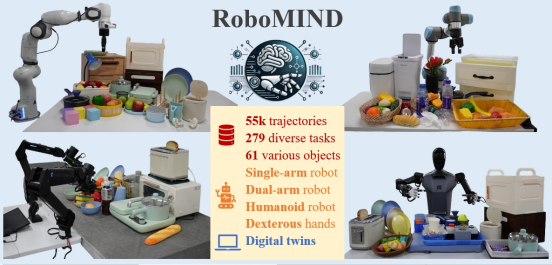
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
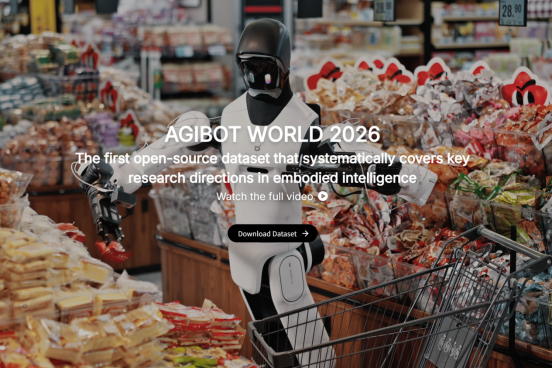
AgiBot World
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...
RoboNet (2019)
数据集介绍 RoboNet 由谷歌机器人团队推出的大规模跨平台机器人视觉交互数据集,以无固定目标的自由交互片段为主,海量视频时序...
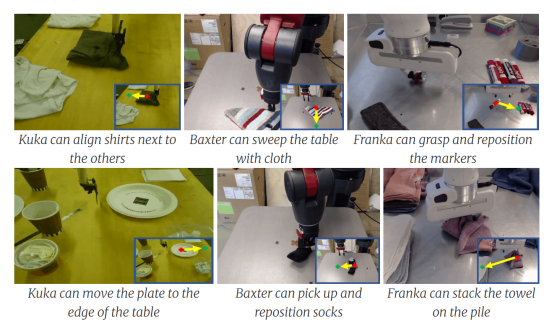
RoboTurk (Real-World) (2019)
数据集介绍 RoboTurk 真实世界数据集由斯坦福大学发布,依托众包远程遥操作构建中等时长家用机器人操作数据集,以低成本众包模...
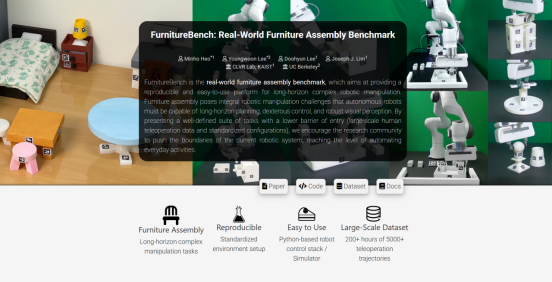
FurnitureBench (2023)
数据集介绍 FurnitureBench 是韩国科学技术院 CLVR 实验室推出的长时序家具装配机器人操作基准数据集,聚焦多阶段、高精度家具...