包含执行失败的轨迹及标注
ARIO (All Robots In One, 2024)
数据集介绍 ARIO 是鹏城实验室多智能体与具身智能研究所、南方科技大学、中山大学联合发布的新标准与统一数据集,旨在为通用、...
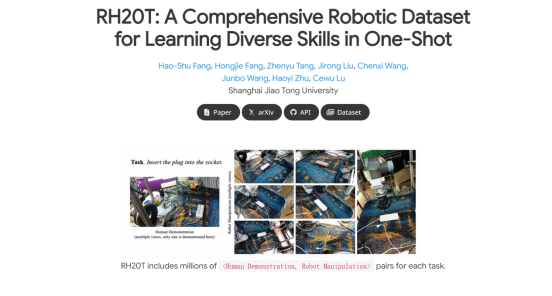
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...
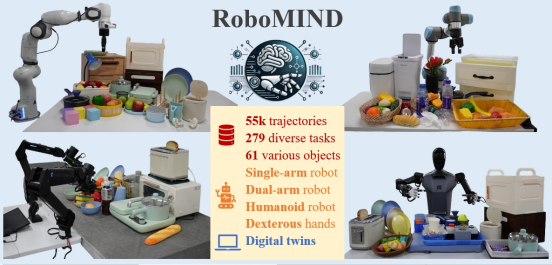
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
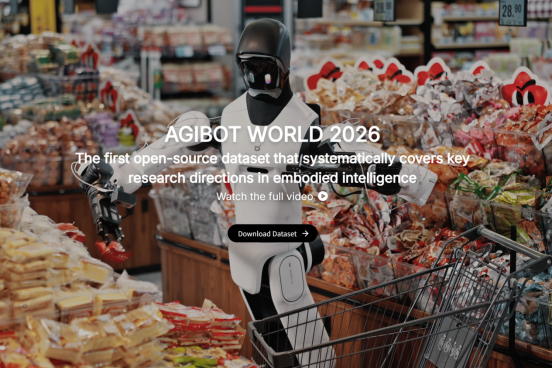
AgiBot World
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...