工厂、装配、分拣等场景
Unitree G1 操作数据集
数据集介绍 Unitree G1 操作数据集是宇树科技为推进全球具身智能行业发展而开源的真机操作数据集,旨在让人形机器人不仅“能跑...
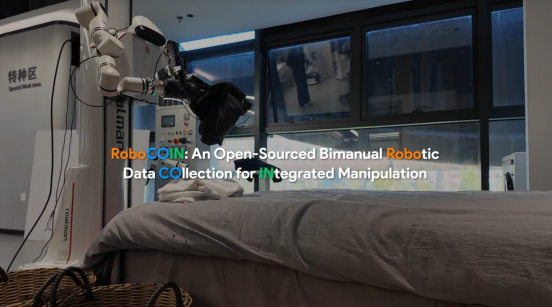
RoboCOIN
数据集介绍 RoboCOIN 是北京人工智能研究院(BAAI) 发布的大规模、跨本体双手操作数据集,旨在弥合双手机器人领域因硬件异质性...
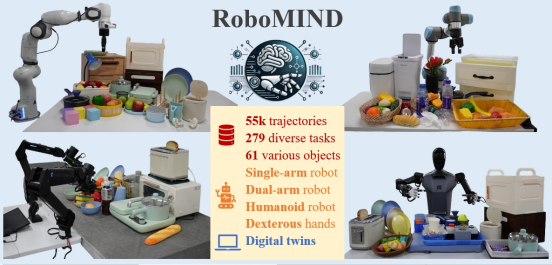
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
白虎(White Tiger)
数据集介绍 (注:基地下载的数据集版本在官网已经被删除,但是官网更新了一个新版本的数据集) 白虎-VTouch(White Tiger-VTo...
LET
数据集介绍 LET (Large-scale Embodiment Teleoperation dataset) 是由乐聚智能构建、已捐赠至开放原子开源基金会OpenLoong社区...
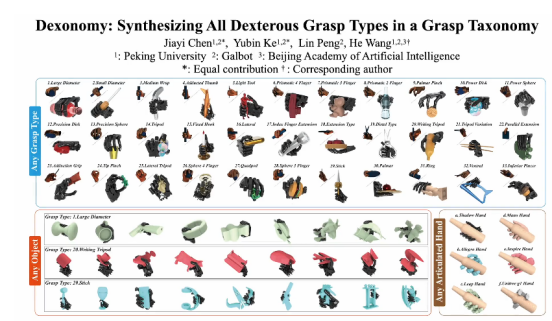
DexonomySim
数据集介绍 DexonomySim 是在国家数据局数字科技和基础设施建设司指导下,由银河通用发起的开源高质量仿真数据集,专为具身智能...
AgiBot World
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...
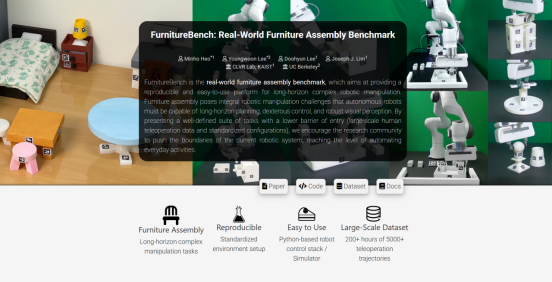
FurnitureBench (2023)
数据集介绍 FurnitureBench 是韩国科学技术院 CLVR 实验室推出的长时序家具装配机器人操作基准数据集,聚焦多阶段、高精度家具...
ManiSkill (2021–2023)
数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
MIME (2018)
数据集介绍 MIME (Manipulation Instruction, Monitoring, and Evaluation) (2018) 是由卡内基梅隆大学发布的早期大规模多任务...