单步或简短序列(通常<10秒)
Open X-Embodiment
数据集介绍 Open X-Embodiment (2023) 数据集由 Google DeepMind 联合全球 21 家顶尖学术机构共同打造,是迄今为止规模最大的开...
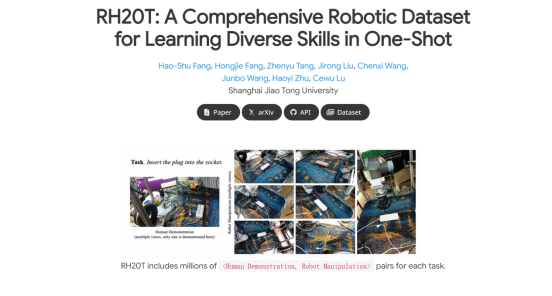
RH20T
数据集介绍 RH20T 是上海交通大学卢策吾教授团队创建的大规模真实世界机器人操控数据集,论文收录于 RSS 2023 和 ICRA 2024 。...
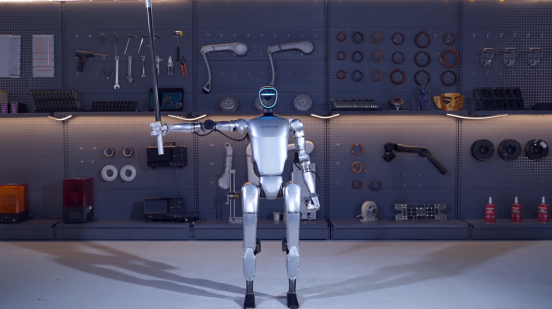
Unitree G1 操作数据集
数据集介绍 Unitree G1 操作数据集是宇树科技为推进全球具身智能行业发展而开源的真机操作数据集,旨在让人形机器人不仅“能跑...
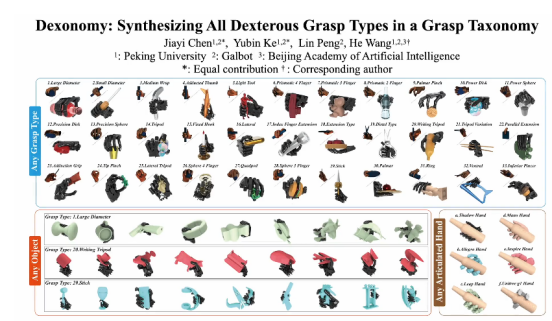
DexonomySim
数据集介绍 DexonomySim 是在国家数据局数字科技和基础设施建设司指导下,由银河通用发起的开源高质量仿真数据集,专为具身智能...
RoboNet (2019)
数据集介绍 RoboNet 由谷歌机器人团队推出的大规模跨平台机器人视觉交互数据集,以无固定目标的自由交互片段为主,海量视频时序...
Language-Table (2022)
数据集介绍 Language-Table (2022) 是由Google DeepMind发布的大规模、语言驱动的机器人操作数据集。该数据集专门设计用于学习...
ManiSkill (2021–2023)
数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
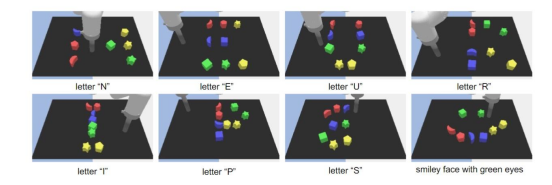
Meta-World (2019)
数据集介绍 Meta-World (2019) 是由斯坦福大学发布的面向多任务和元强化学习研究的仿真机械臂操作基准环境。该数据集/环境包含5...
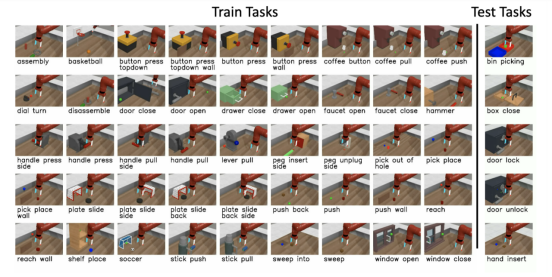
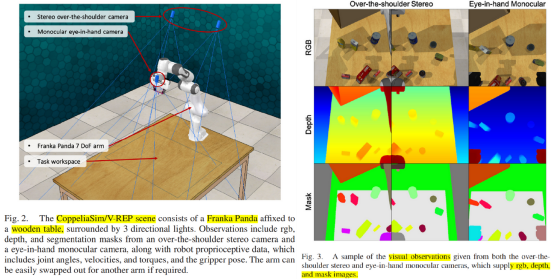
RLBench (2020)
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...
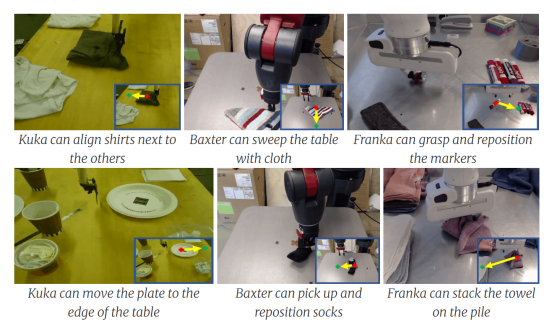
MIME (2018)
数据集介绍 MIME (Manipulation Instruction, Monitoring, and Evaluation) (2018) 是由卡内基梅隆大学发布的早期大规模多任务...