配套仿真环境1:1复现
InternScenes
数据集介绍 InternScenes 是上海人工智能实验室发布的大规模、可模拟室内场景数据集,论文收录于 NeurIPS 2025。具身人工智能的...
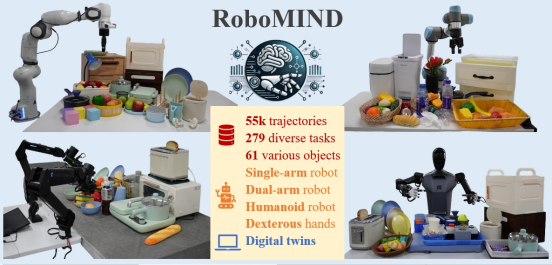
RoboMIND
数据集介绍 RoboMIND(多本体智能规范数据用于机器人操作)是北京仿人机器人创新中心发布的大规模、多本体真实机器人操作数据集...
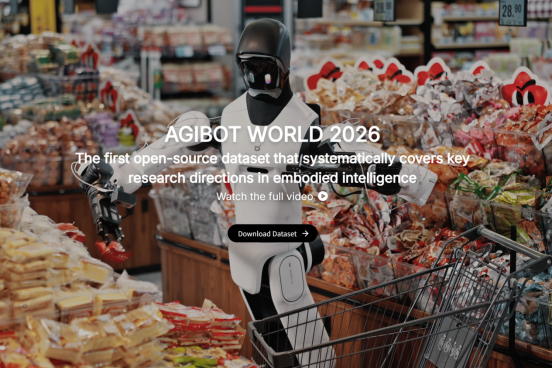
AgiBot World
数据集介绍 AgiBot World 2026 数据集延续了 AgiBot World 开创的高质量数据标准,基于海量真实场景构建,系统性地覆盖了具身智...
VIMA (2023)
数据集介绍 VIMA 是一个大规模、多模态的机器人操作基准数据集,旨在通过多模态提示(文本、图像、视频的交错序列)来训练通用...
ManiSkill (2021–2023)
数据集介绍 ManiSkill (Manipulation Skill) (2021–2023) 是由加州大学圣地亚哥分校发布的基于SAPIEN物理引擎的大规模机器人操...
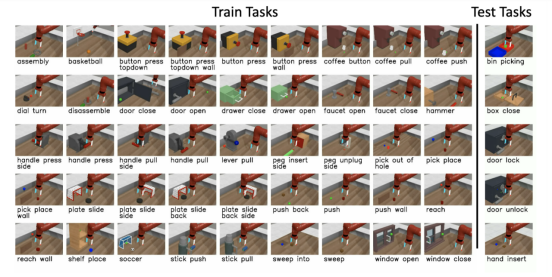
Meta-World (2019)
数据集介绍 Meta-World (2019) 是由斯坦福大学发布的面向多任务和元强化学习研究的仿真机械臂操作基准环境。该数据集/环境包含5...
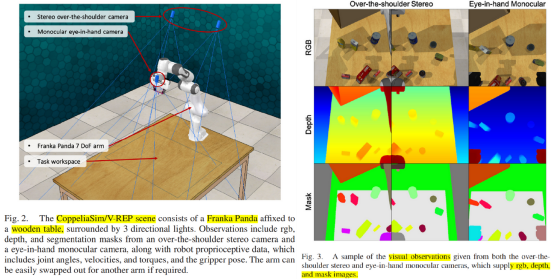
RLBench (2020)
数据集介绍 RLBench 由帝国理工学院推出的仿真机器人操作基准数据集,基于 CoppeliaSim 虚拟仿真环境构建,包含跨度极大的难易...